Novelty Detection in Reinforcement Learning with World Models
ICML 2025 Spotlight — with Geigh Zollicoffer, Kenneth Eaton, Julia Kim, Wei Zhou, Robert Wright, and Mark Riedl
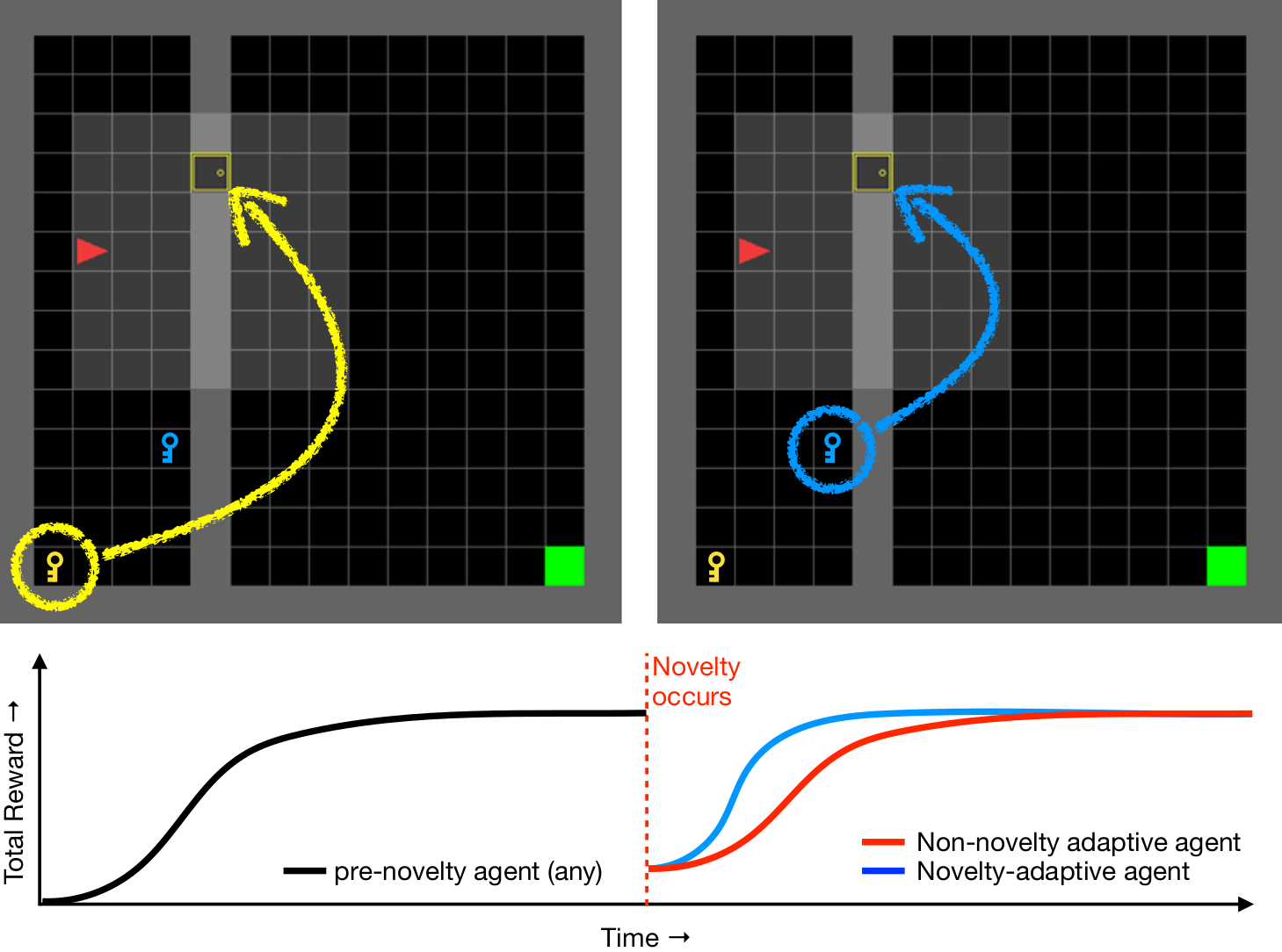
Reinforcement learning (RL) using world models has found significant recent successes. However, when a sudden change to world mechanics or properties occurs then agent performance and reliability can dramatically decline. We refer to the sudden change in visual properties or state transitions as novelties. Implementing novelty detection within generated world model frameworks is a crucial task for protecting the agent when deployed. In this paper, we propose straightforward bounding approaches to incorporate novelty detection into world model RL agents, by utilizing the misalignment of the world model's hallucinated states and the true observed states as an anomaly score. We provide effective approaches to detecting novelties in a distribution of transitions learned by an agent in a world model. Finally, we show the advantage of our work in a novel environment compared to traditional machine learning novelty detection methods as well as currently accepted RL focused novelty detection algorithms.